Home
Innovations
Home / Innovations / ODUS 1.0
ODUS 1.0

Learning from the community feedback, the Vision Assist 2.0 was further enhanced and given a new name ODUS (Object Detection Universal System).
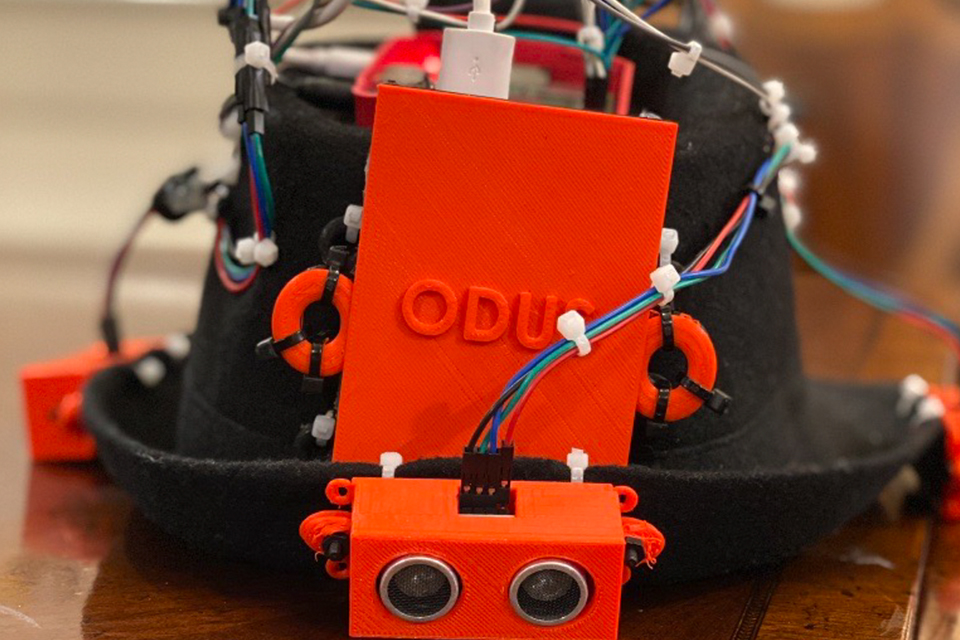
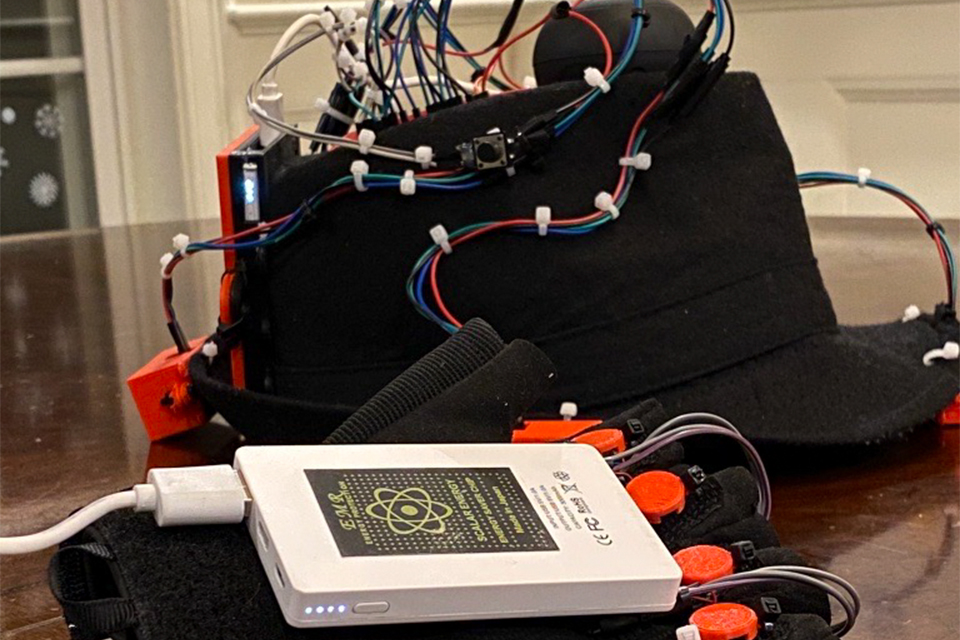
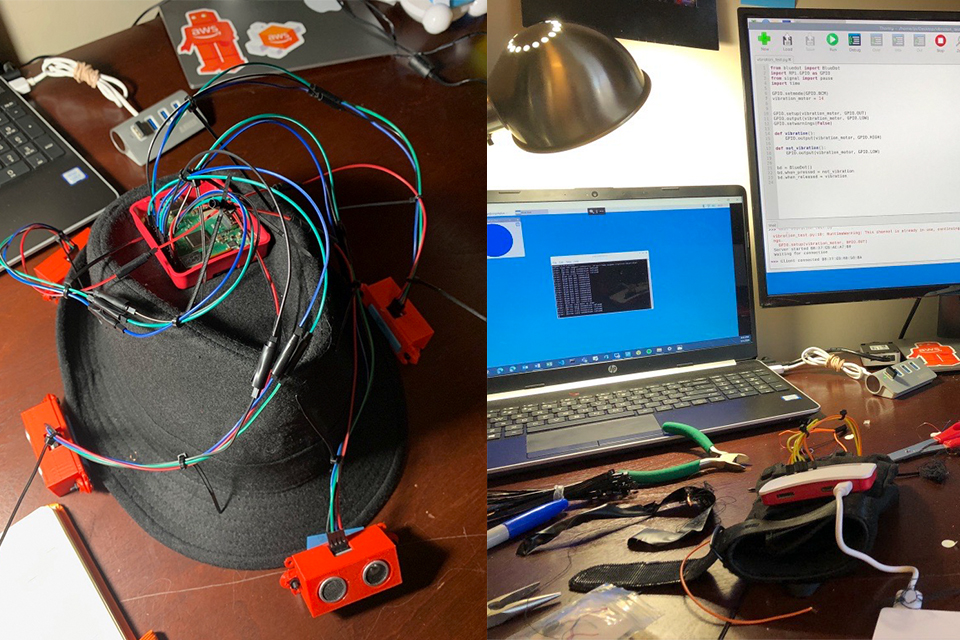
The Object Detection Universal System (O.D.U.S) is a wearable device which acts as an aid for the visually impaired to navigate through their surroundings and maneuver around objects without any obstructions. O.D.U.S. utilizes two Raspberry Pi single-board computers, a Raspberry Pi A+ and Raspberry Pi Zero W, four ultrasonic sensors, four vibration motors, two buttons, and two battery packs, all housed on a glove and a hat connected wirelessly. The Ultrasonic Sensors are placed on the hat in the four directions, front, back, left, and right. All four of the sensors collect data, and the program, written in Python, on the Raspberry Pi A+ will parse that data and produce an output based on the closest distance measured in the radius of up to three feet. The outputs on the hat are a computer-generated voice that converts the data in a user-friendly format. There is also a buzzer positioned on the hat that produces a set of tones, based upon the distance of an object close to the user. These modes can be set by one of the two buttons on the hat, pressing the right button activates the speaking voice, and pressing the left button activates the buzzer. The data from the Ultrasonic Distance Sensors will be sent to the Raspberry Pi Zero W, positioned on the glove, and one of the four vibration motors, located in the front, back, left, and right which vibrate producing a noiseless alert. This data is transmitted over Bluetooth.
Fairs and Expositions
- Cheshire Public Schools Discovery Expo
- CT Science and Engineering Fair
- CT Invention Convention
- National Invention Convention
Awards Won
- CT Science and Engineering Fair
- CT Science and Engineering Fair Finalist
- Engineering: Second Place
- IEEE, Connecticut Section Award
- American Society of Safety Professionals, CT Valley Chapter
- CT Invention Convention
- CT Invention Convention Finalist
- National Invention Convention Finalist
- National Invention Convention
- Connectivity Award Presented by Raytheon Technologies
Gallery ODUS 1.0


Featured Videos
Certificates
Certificates of ODUS 1.0